Arduino car 4wd all-in-one #2parte
- RobNico

- 28 gen 2021
- Tempo di lettura: 3 min
Nella prima parte abbiamo effettuato il cablaggio e il setup del Sensore Ultrasuoni e del Servo Motore, vediamo ora come mettere in pratica il movimento evita ostacoli della CAR 4WD.
Evita Ostacoli Car 4WD
Collegare Arduino UNO al computer, carica il programma Obstacle_Avoidance_Car4WD , dopo aver caricato il programma scollegare il cavo USB, mettere la CAR 4WD a terra e inserire l'alimentazione.
Il veicolo si sposterà in avanti, il servo motore continua a ruotare e il sensore Ultrasuoni misura la distanza in modo continuo. Se ci sono ostacoli avanti, la CAR 4WD si fermerà e il veicolo cambierà direzione per superare l'ostacolo.
Sensore Tracking Segui Linea SMD a 3 Vie
Il sensore follower permette, se montato su un robot semovente, di seguire un percorso realizzato per esempio con del nastro nero su di un foglio bianco.
Ha tre sensori monoblocco IR che sono costituiti da una coppia di LED-ricevitore IR ciascuno.
Per farlo, si sfrutta la proprietà dei materiali di riflettere o di assorbire i raggi IR emessi per rilevare il percorso da seguire. Queste variano a seconda del colore: le superfici nere tendono ad assorbire la quasi totalità delle radiazioni, mentre le superfici bianche tendono a riflettere i raggi IR.
Sfruttando questo comportamento possiamo distinguere la presenza o meno di una linea nera su una superficie bianca, o viceversa, e di seguirla.

Il sensore come possiamo vedere nell'immagine ha 5 PIN:
GND PIN G (ground)
VCC +5V PIN V (+5V)
OTL sensore sinistra PIN 9 (S)
OTC sensore centro PIN 10 (S)
OTR sensore destra PIN 11 (S)

Posizionare il sensore nella parte inferiore dello chassis, come in figura sotto:


Codice Test Sensore Tracking Segui Linea SMD a 3 Vie
Dopo il cablaggio del Sensore Tracking Segui Linea copiare o scaricare il codice nel IDE di Arduino, collegare la scheda del controller UNO al computer, carica il programma nella UNO board.
Preparate un foglio di carta bianca A4 con al centro una linea creata con del nastro nero.
Una volta caricato Il programma posizionare il sensore segui linea sopra la linea nera, spostando la Car 4WD a destra e sinistra, sul Monitor seriale dovrà apparire il valore del sensore come in figura sotto:

Segui Linea 4WD
Creare un pista con nastro nero da elettricisti sopra alcuni fogli bianchi (esempio 3 fogli di 70x50).

Collegare Arduino UNO al computer, carica il programma Line_traking_Car4WD , dopo aver caricato il programma scollegare il cavo USB, mettere la CAR 4WD a terra e inserire l'alimentazione.
Il veicolo si sposterà in avanti a destra o a sinistra seguendo la linea nera.
Sensore Infrarosso
Il Sensore a infrarossi unito ad un telecomando è un altro metodo che utilizzeremo per il controllo remoto della Car 4WD.
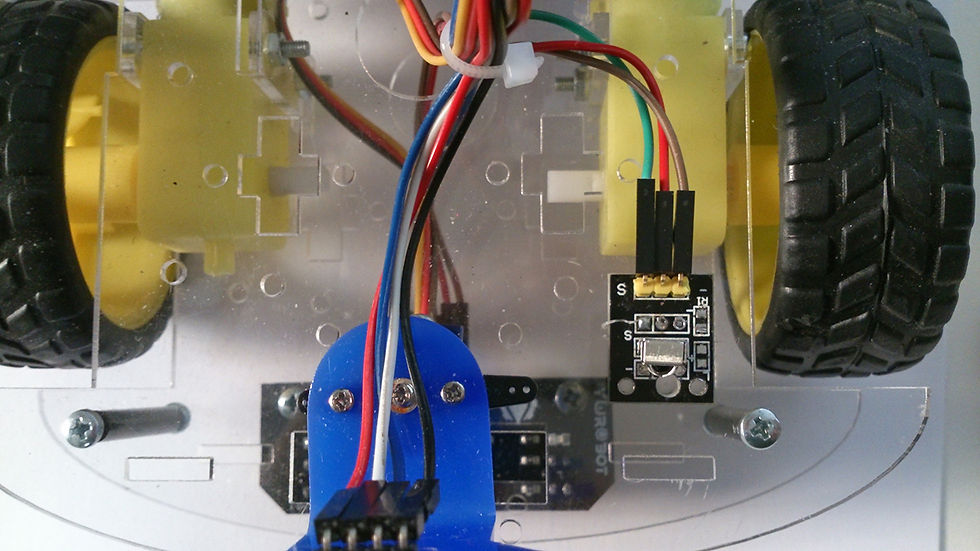
Per il sensore possiamo utilizzare qualunque tipo, in commercio troviamo facilmente il modulo in figura costituito da un sensore VS1838B, importante è conoscere la disposizione dei PIN.


Il sensore come possiamo vedere nell'immagine ha 3 PIN:
OUT PIN A5 (S)
GND PIN G
VCC PIN V

Posizionare il modulo sensore nello chassis con nastro biadesivo o con distanziatore di plastica per evitare contatto accidentale con le piste di rame.

In un primo momento ho utilizzato il telecomando originale compreso nel IR kit Arduino, ma nella pratica rispondeva ai comandi con ritardo e il campo di azione era limitato, perciò il mio consiglio è di utilizzare un telecomando TV ( Per approfondire l'argomento vedere il post relativo qui).
Dopo il cablaggio del Sensore Infrarossi copiare o scaricare il codice nel IDE di Arduino, collegare la scheda del controller UNO al computer, carica il programma nella UNO board.
Eseguito l'upload, nel monitor seriale del IDE di Arduino, premendo i pulsanti del telecomando avremo una serie di codici esadecimali, nel mio caso i valori esadecimali sono:

20DF02FD tasto freccia su
20DF827D tasto freccia giù
20DFE01F tasto freccia sinistra
20DF609F tasto freccia destra
20DF22DD tasto OK
Corrispondono ai pulsanti del telecomando usato, basta appuntarli su un foglio e copiarli nelle righe dello sketch che segue facendoli precedere da 0x come vediamo sotto:
#define IR_Go 0x20DF02FD
#define IR_Back 0x20DF827D
#define IR_Left 0x20DFE01F
#define IR_Right 0x20DF609F
#define IR_Stop 0x20DF22DD
Collegare Arduino UNO al computer, carica il programma IR_Remote_Control_Car , dopo aver caricato il programma scollegare il cavo USB, mettere la CAR 4WD a terra e inserire l'alimentazione.
Il veicolo si sposterà premendo i tasti freccia del telecomando e si fermerà con il tasto centrale OK.
Nella 3 parte del tutorial vedremo il cablaggio del modulo Bluetooth e per finire il programma All_in_One_Robot che conterrà al suo interno tutte le funzioni per comandare la nostra Car 4WD e un APP Android.



Commenti